题目:Monocular SLAM with Point and Line Features Applied to Spacecraft Relative Navigation
发表时间:2024年9月11日
期刊:《International Journal of Aeronautical and Space Sciences》
作者:西安交通大学博士生潘锐滔,王晨希副教授等
简介:本文提出一种融合点与线特征的单目视觉SLAM方法,具备特征互补性和表示一致性高、系统稳定性强等特点,有效提升非合作航天器相对导航的精度与鲁棒性,以适应复杂空间环境,具备实时性。
原文链接:https://link.springer.com/article/10.1007/s42405-024-00817-2
引用本文:Pan, R., Wang, C., Zhai, Z. et al. Monocular SLAM with Point and Line Features Applied to Spacecraft Relative Navigation. Int. J. Aeronaut. Space Sci. 26, 1258–1278 (2025). https://doi.org/10.1007/s42405-024-00817-2
摘要:实时估计目标位姿对于航天器相对导航至关重要。如果目标是非合作且未知的,即没有先验信息,需要使用同时定位与建图(SLAM)技术来估计目标位姿和三维形状。近期,一些基于点特征的方法,例如ORB-SLAM,已被用于航天器交会。然而,点特征在弱纹理目标和光照变化(常见于空间环境中)中表现不佳。本文提出了一种基于点和线特征的单目SLAM系统用于航天器相对导航,充分探索了不同特征的优势。具体地,改进了线特征提取和匹配算法,并使用普吕克坐标系表示线段以解决端点不一致问题;此外,采用平滑优化方法在保证实时性的同时实现更好的状态估计。我们在公开数据集上开展实验验证,结果表明,与ORB-SLAM相比,所提方法在复杂的空间环境中取得了更高的精度,同时提高了系统的鲁棒性,其中位姿估计精度提高69.2%,并获得更好的外形重建效果。该算法运行帧率为17.83 Hz,满足实时性要求。
关键词:相对导航,非合作目标,视觉SLAM,位姿估计,线特征
一、方法部分:
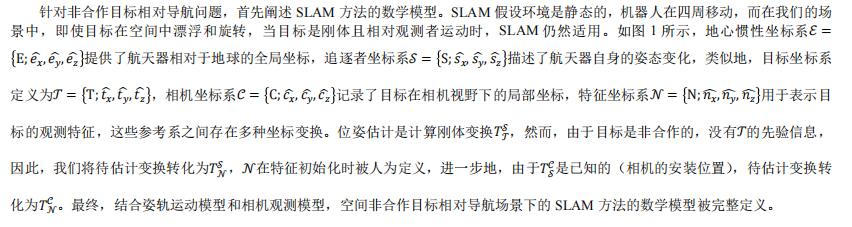
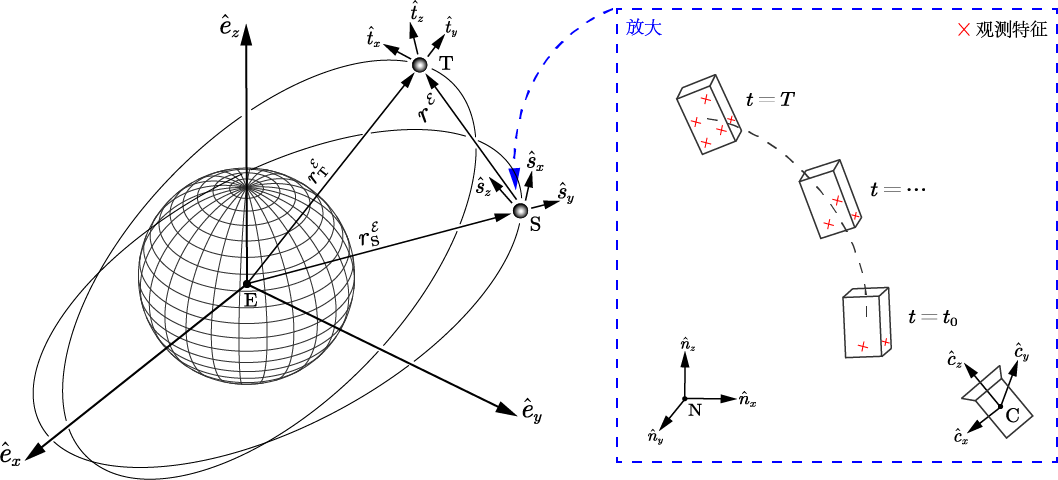
图1 相对导航中参考坐标系的定义
本文所提方法改编自ORB-SLAM,该方法的架构包括一个前端目标跟踪线程和一个后端目标重建线程,如图2所示,跟踪线程估计目标的姿态,重建线程估计目标的三维形状。
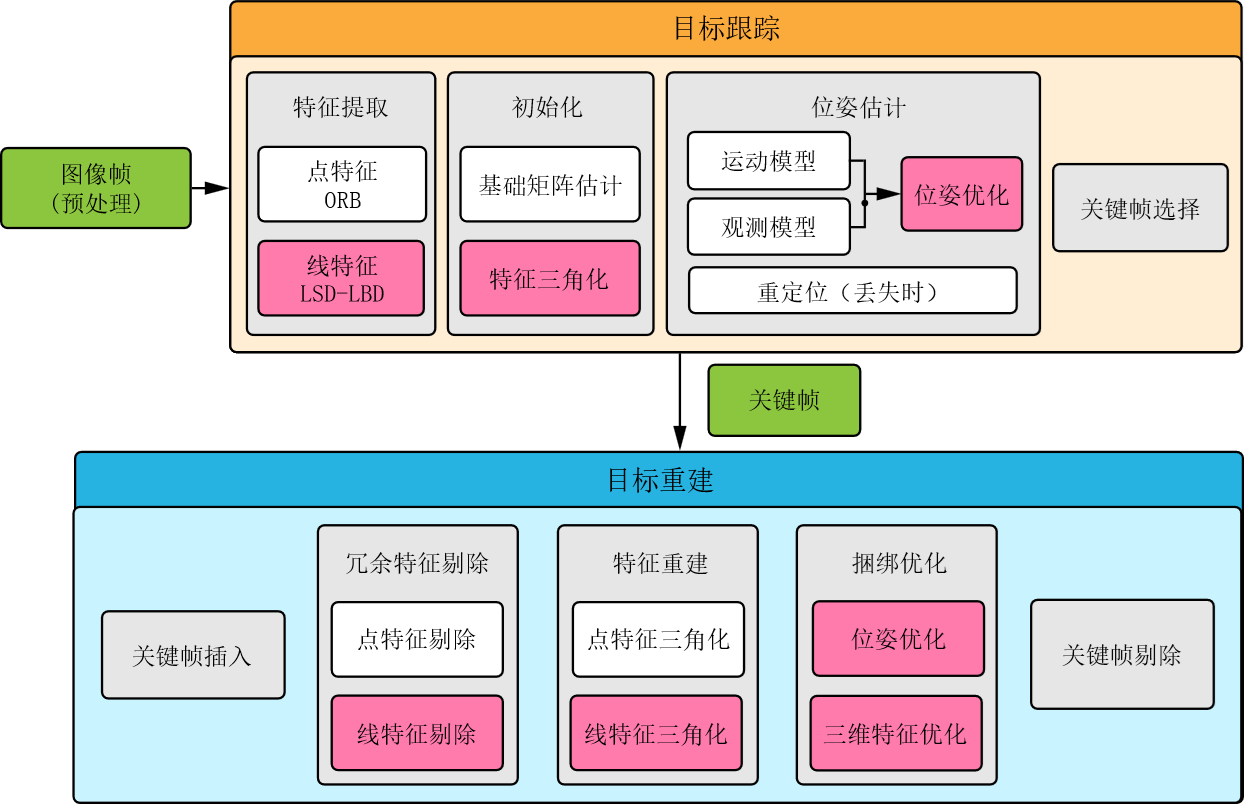
图2 所提方法框架图:由于光照变化和弱纹理目标的影响,点特征对于空间相对导航不够稳健,我们提出的方法结合了点和线特征来提升系统的稳健性,特别地,ORB-SLAM与所提方法之间的差异用粉色标出。
在跟踪线程中,线特征采用LSD算法提取,并调节隐藏参数以提高特征提取速度,而后线特征使用LBD进行描述,用于两图之间线特征的匹配。特别地,我们实施了一种拒绝策略并且合并不相连的线段以实现准确的线特征匹配,拒绝策略包括长度抑制和响应抑制,我们将长度小于30像素的线段视为噪声,此过程也会拒绝一些短线段,但它们对状态估计的贡献可以忽略不计。此外,我们仅保留响应最大的前40条线段,这可以减少线段的数量以加速匹配过程。
之后,我们利用合并算法将来自同一线的线段连接起来。首先,将线段按长度降序排列,以减少短线段的影响,因为长线段具有连续较强的梯度,因此更可信。然后,基于角度相似性和空间邻近性对线段进行聚类,如图3(a)、图3(b)所示。线段使用不同的颜色进行聚类,特别地,白色表示未分类线段。
在线特征匹配过程中,不可避免地会出现错配的情况。线段合并算法有助于提高匹配性能,如图3(c)、图3(d)所示。我们使用角度直方图来检测异常值,这些异常值的角度与整体角度差异较大,异常匹配用黄色标出。
图3 线特征提取与匹配:线段融合能够减少冗余线段,初始检测到 40 条线段,合并后保留 25 条线段;合并前的37个匹配中有6个异常值,而合并后的24个匹配线中有3个异常值;该方法能够提高匹配的速度和准确率。
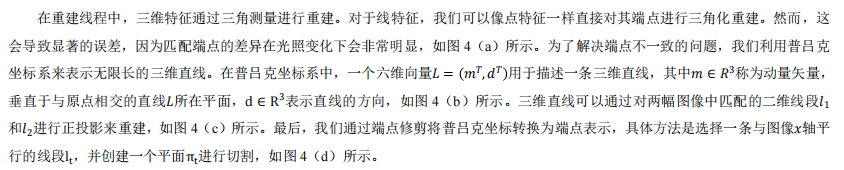
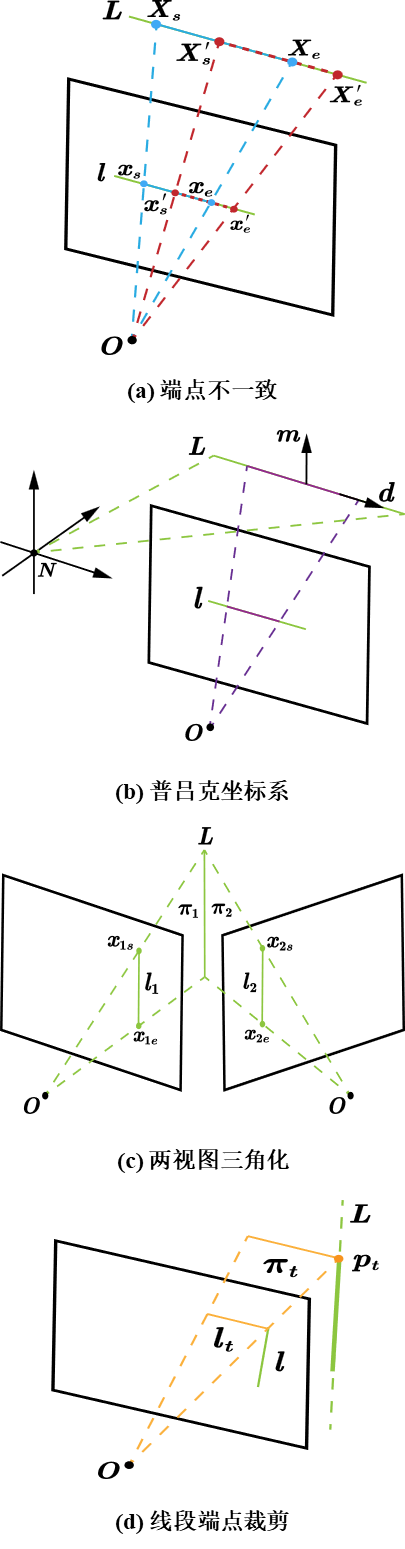
图4 线段三维重建过程:首先将线段端点表示转换为普吕克坐标表示,而后通过两视图三角化方式重建三维直线,为了与点特征的表示保持一致性,通过裁剪方式将直线转化为线段端点表示。
我们使用捆绑调整最小化测量误差来优化目标位姿和三维点、线特征的位置。我们还通过检查点、线特征的深度和重投影误差以剔除异常值,以及通过描述子的相似性来融合相似的特征。因此,可以将特征数量保持在合理的范围内。
二、实验部分:
所提方法已在卫星硬件在环交会轨迹(SHIRT)数据集上进行了验证,该数据集包含模拟交会轨迹中卫星模型的连续图像,跟踪效果如图5所示。实验使用配备8GB内存的Intel Core i5-10400F CPU (2.90 GHz)进行。考虑随机性,我们重复运行算法五次,并报告所有结果的中值。我们对估计的位姿进行了定量分析,并对估计的三维形状进行了定性分析。作为对照组,我们在同一数据集上运行ORB-SLAM算法。
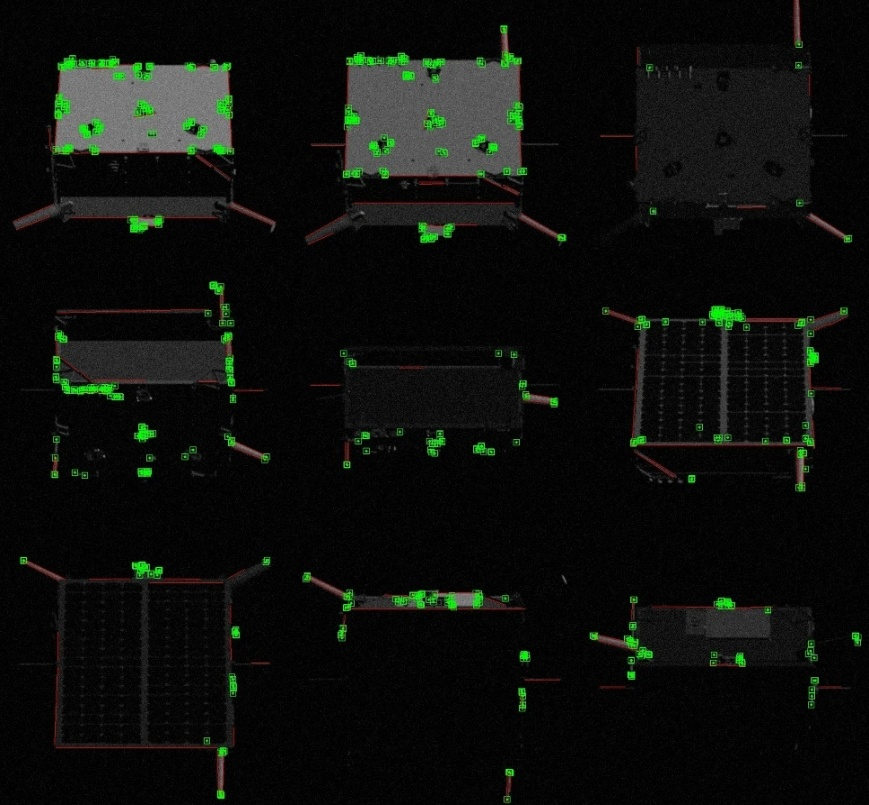
图5 算法在数据集上的运行效果:数据集由合成图像组成,模拟航天器交会场景,其中,追逐者保持沿轨分离,而目标则绕一个主轴旋转。线特征在目标弱纹理和光照变化的环境中更加鲁棒,而点特征容易丢失。
ORB-SLAM的位姿估计结果如图6所示,目标跟踪大约在4秒、6秒和8秒时丢失,虽然可以借助重定位技术重新定位并保持跟踪,但最终在10秒后无法跟踪目标。较大的姿态误差总是出现在跟踪丢失附近,这对于相对导航来说是不可接受的。结果表明,仅使用点特征进行SLAM不够稳健,在空间环境中会导致较大的姿态误差。
图6 ORB-SLAM的位姿估计结果:由于ORB-SLAM在光照变化下对弱纹理目标的效果不佳,导致目标跟踪经常丢失。因此,我们报告所有实验中跟踪时间足够长的最佳结果,即实验5
所提方法的位姿估计结果如图7所示,与ORB-SLAM相比,所提方法可以有效提升系统的精度和稳健性。即使目标跟踪丢失,由于利用线特征可以进行精确的三维形状重建,追踪器仍能快速重新定位,因此在跟踪丢失时不会出现较大的位姿误差。尽管在点特征大量减少的情况下跟踪精度会出现波动,但所提方法能够借助线特征实现对目标的持续跟踪。绝对轨迹误差(ATE)的均方根误差(RMSE)通常用于表示SLAM算法的整体精度,ORB-SLAM的RMSE为0.417966,所提方法的RMSE为0.129061,姿态估计的精度提高了69.2%。
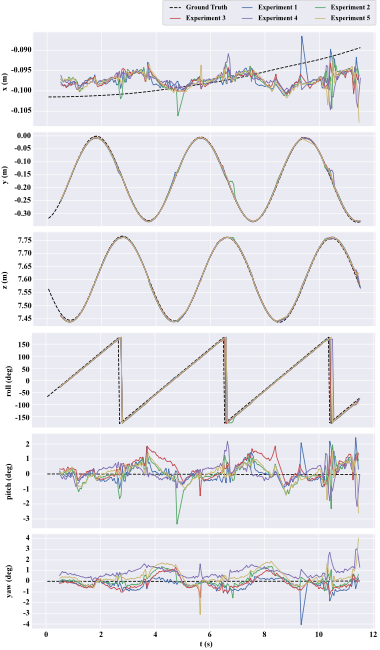
图7 所提方法的位姿估计结果:估计位姿与真实值(GT)基本一致,虽然x轴、p角和y角存在波动,但误差仍然较小
在外形重建方面,由于缺乏三维模型的拓扑结构,我们通过三维特征可视化进行定性分析,ORB-SLAM的重建效果如图8所示,所提方法的重建效果如图9所示。ORB-SLAM估计的三维形状仅包含点特征,难以识别目标的结构,并且目标周围存在许多点的异常值,这可能是由于特征不匹配以及基于较大位姿误差的地图创建造成的。相比之下,所提方法的点特征分布在目标的角落,异常值较少,使用线特征有助于获取清晰的结构信息,可以发现目标底部包含一个平面,并且可以识别出三个圆柱形天线,用于指导后续的在轨任务。
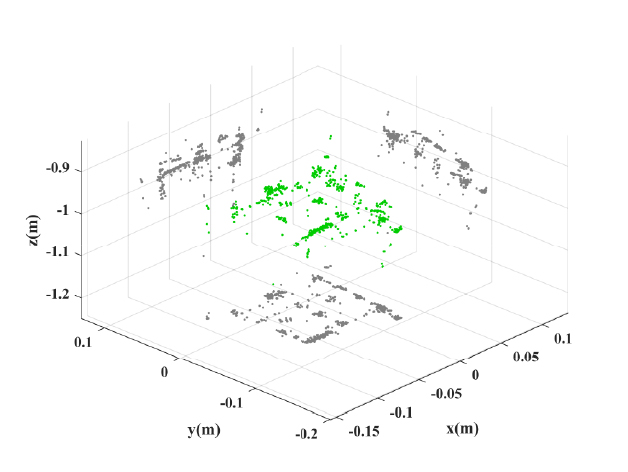
图8 ORB-SLAM的外形重建效果
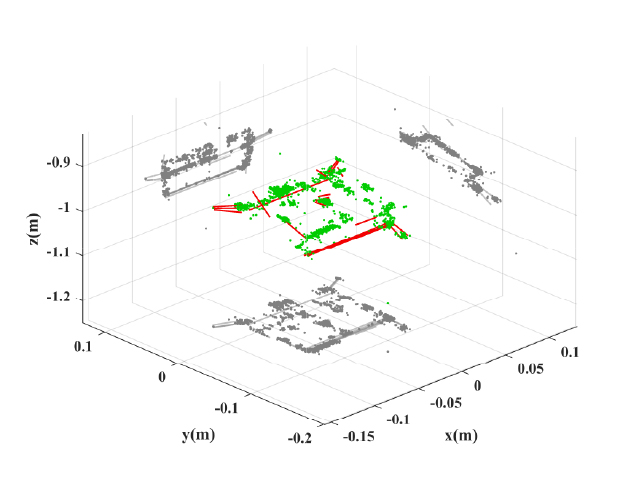
图9 所提方法的外形重建效果
在实时性方面,虽然加入线特征可以提高系统的精度和鲁棒性,但是也增加了算法的计算复杂度。ORB-SLAM的帧率约为28.00Hz,所提方法的帧率约为17.83Hz,对于在线运行(大于10Hz)来说是可以接受的。所提方法牺牲了一定的运行效率,以换取系统鲁棒性和准确率的明显提升。
三、未来与展望:
考虑到系统的实时性,可以利用更快的直线提取方法(例如基于CNN的特征提取)来降低计算复杂度,并探索其他直线表示方法优化系统性能。此外,还可以加入回环检测和校正功能,以提高系统精度。
【作者简介】
潘锐滔(第一作者):西安交通大学未来技术学院博士在读,主要研究方向为:空间态势感知,在轨目标检测。
王晨希(通讯作者):西安交通大学机械工程学院副教授,主要研究方向为:故障诊断,自适应控制与强化学习。2022年入选陕西省科协青年人才托举计划,第11届上银优博论文佳作奖,发表SCI论文30余篇,国家发明专利8项,出版学术专著1部。
翟智:西安交通大学机械工程学院副研究员,博士生导师,航天制造与信息工程研究所副所长,主要研究方向为:航天器智能制造与健康管理,复合材料损伤检测,结构健康监测。在领域权威期刊发表SCI论文15篇,参与出版相关领域专著2本、教材1部,获得教育部技术发明一等奖1项,授权发明专利3项申请发明专利7项。

