题目:Pose Estimation and Neural Implicit Reconstruction Towards Non-Cooperative Spacecraft Without Offline Prior Information
时间:2024年10月
期刊:《IEEE Transactions on Aerospace and Electronic Systems》
作者:西安交通大学博士生韩冰,王晨希副教授等
简介:论文提出了一种面向未知航天器位姿估计的新方案,取消了对于非合作航天器的图像或CAD模型先验的依赖。该解决方案核心在于使用在线的神经隐式重建和目标参考系估计替代了离线的先验信息。在执行过程中,只需在线捕获新目标的少量数据帧进行初始化,即可高效输出物体的姿态参数和对齐纹理的3D模型。
原文链接:https://ieeexplore.ieee.org/document/10715656
引用本文:B. Hanet al., "Pose Estimation and Neural Implicit Reconstruction Towards Non-Cooperative Spacecraft Without Offline Prior Information," inIEEE Transactions on Aerospaceand Electronic Systems, doi: 10.1109/TAES.2024.3479199.
摘要:非合作航天器姿态估计在轨道服务中起着至关重要的作用。然而,现有的姿态估计方法通常假设目标物体的CAD模型作为先验信息,用于离线训练或在线模板匹配。这限制了姿态估计方法的通用性。为了探索一种通用的解决方案,本研究提出了一种针对未知航天器的姿态估计方法。我们的方法不仅不依赖于目标的先验模型或图像先验,而且还能同步输出姿态参数和对齐的目标纹理模型。具体而言,我们并行使用了三个模块:姿态跟踪、神经对象重建和目标参考系(TRF)估计。首先,利用时间数据的知识,我们优化姿态图以提供稳定的跟踪性能。然后,我们使用神经隐式表示来重建目标纹理模型,在重建过程中联合优化姿态参数。最后,我们提出了TRFE-Net用于在线估计TRF。所获得的TRF用于校正传感器参考框架(SRF),将姿态跟踪和重建问题从场景中心转换为航天器中心。实验结果表明,尽管所提出的方法减少了对先验信息的需求,但它在多个对象上仍能取得良好的性能,并且能够有效处理大规模运动、镜面高光、细长结构和对称结构。
关键词:航天器位姿估计,神经隐式表示,姿态图优化,深度学习。
一、方法:
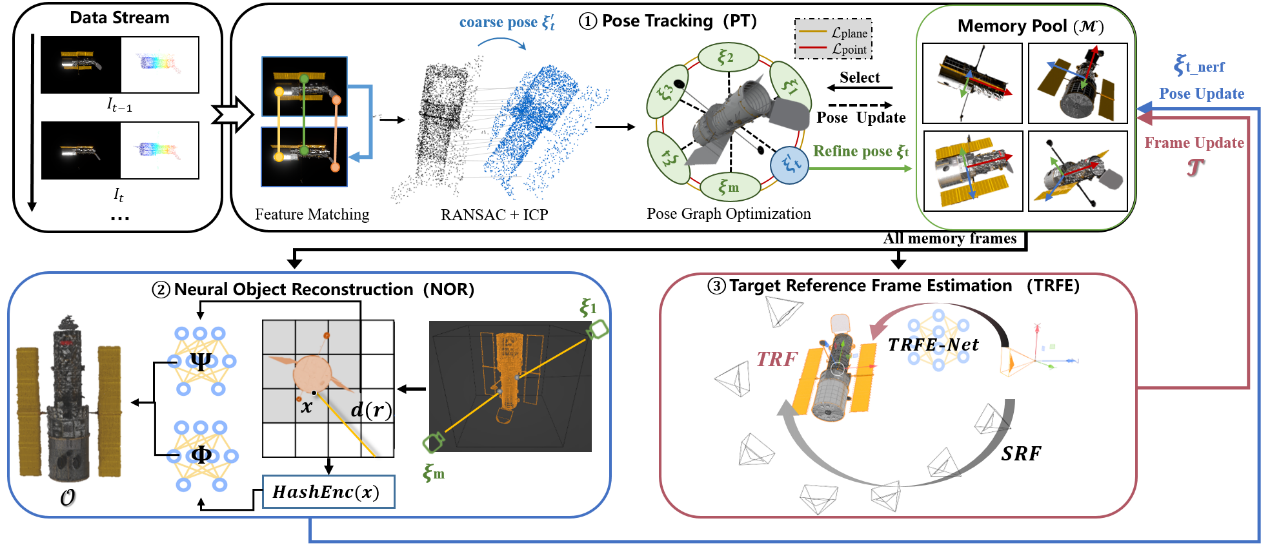
我们的方法由三个并行的流程组成。位姿跟踪(PT)作为主流程,使用单帧ICP和多帧的位姿图优化进行从粗到细的位姿跟踪,质量较高的记忆帧将通过内存池与神经目标重建(NOR)和目标参考系估计(TRFE)通信。NOR合并多个记忆帧点云与姿态,通过采样光线进行神经重建输出纹理模型。在这个过程中记忆帧的姿态被同步优化。最后,TRFE利用合并的内存帧点云预测TRF,该TRF用于将记忆帧的姿态从传感器作息系校正到以航天器为中心的物体坐标系,将位姿跟踪转化为位姿估计。
实验结果:我们按照空间交会的场景模拟相对距离,跟踪卫星与目标卫星的距离被限制在100m以内,追踪器被放置在比目标卫星稍高的轨道上,通过两次减速转移至目标轨道。使用哈勃望远镜,高分13号和立方体星作为目标卫星。空间中的姿态跟踪具有大规模位移、对称性和镜面反射等特性,我们测试了我们方法在这些困难场景下的鲁棒性,试验结果表明,即便没有使用目标的先验模型,我们的方法依然能够稳定地实现对未知物体的跟踪和重建。
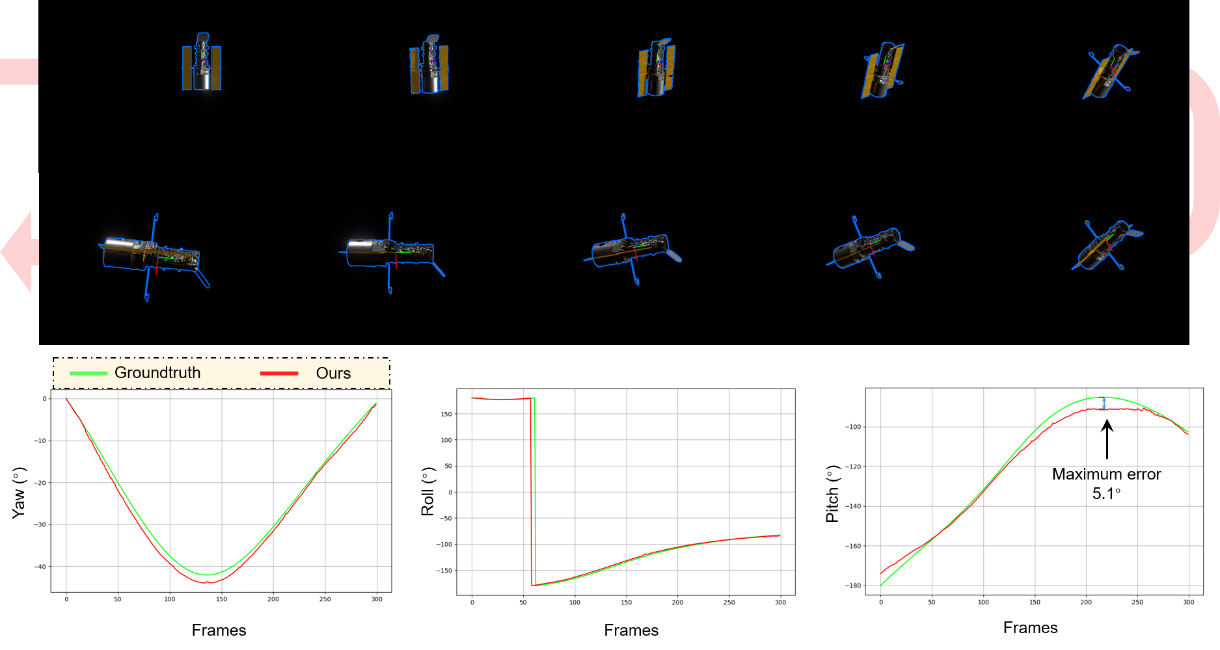
哈勃望远镜的位姿跟踪结果,该轨迹模拟了大规模位移场景
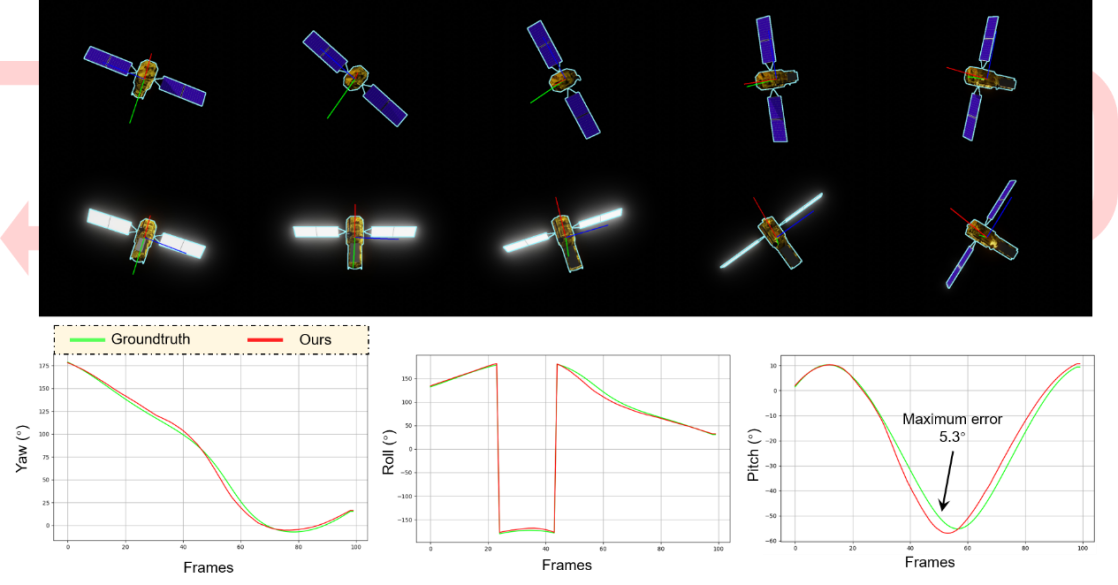
高分13的位姿跟踪结果,该轨迹模拟了镜面反射场景
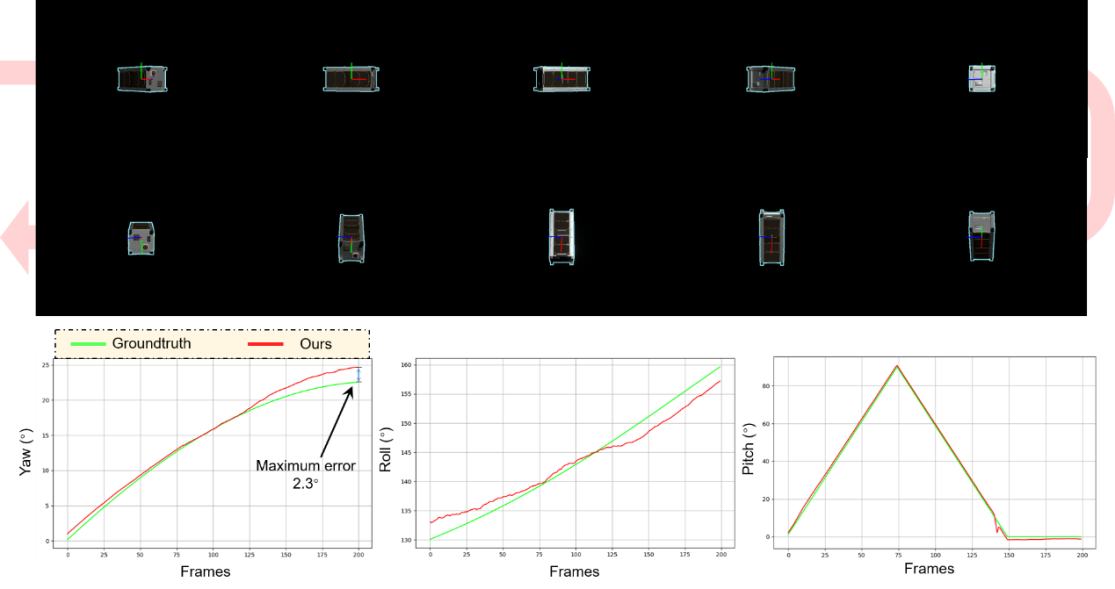
CubeSat的位姿跟踪结果,该轨迹模拟了对称性场景
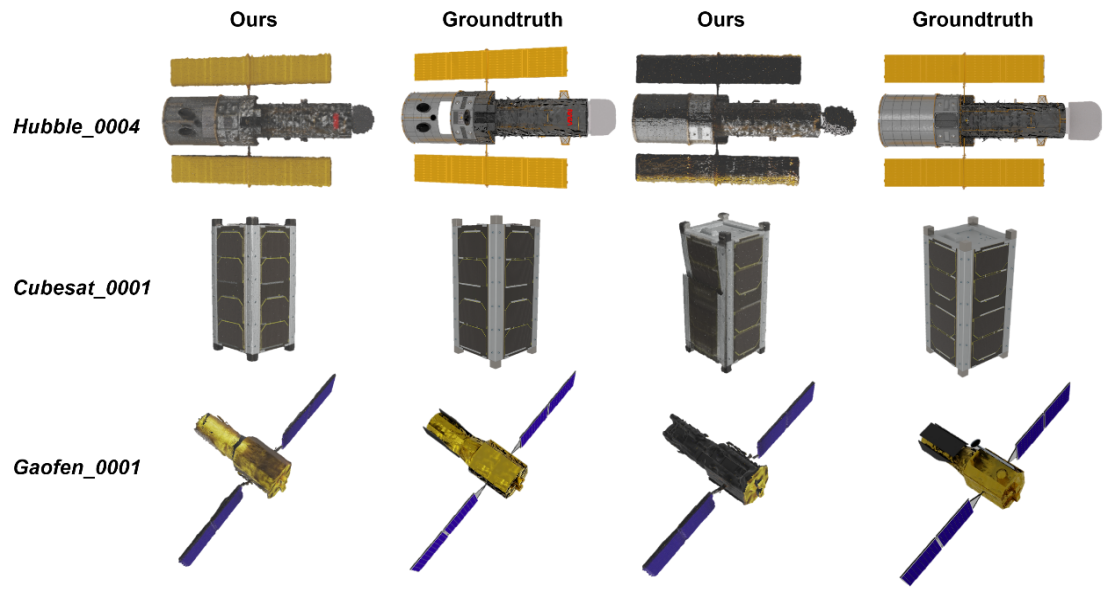
在线神经重建的结果,在姿态跟踪的同时完成的
二、实时性:
我们的方法在特征匹配和位姿图优化环节中借助了GPU用于加速计算,因此我们的模型被部署在具有intel i5 10400f的CPU和NVIDIA GTX 4070的GPU平台上用于测试个模块所需的计算时间。PT线程以10.269Hz处理帧,同时,NOR在后台运行,它每轮训练平均需要6.83秒,TRFE全局只需要正向传播一次。最终,模型的所有过程以7.415 Hz左右运行。

三、未来与展望:
我们的工作在航天任务中实际应用是有距离的。主要包括三个方面,这三个方面也将作为我们未来的工作内容:
1. 位姿跟踪精度:我们实现了对未见航天器的位姿跟踪与重建。然而,姿态跟踪的精度无法稳定维持在1°以内,这种误差在具体任务种是无法使用的。
2. 实时性:10hz是近实时的。然而,我们的方法依靠了较为新的GPU,在计算资源受限的天基平台上,还需要进一步优化,尽可能在更少的算力资源上实时工作。
3. 泛化性:对比之前的方法,我们在泛化性层面更进一步。然而,这种泛化性是受限的,因为我们的方法是基于历史发射的有限个卫星模型训练的,这种分布还不足以概括所有卫星。
作者简介:
韩冰(第一作者),西安交通大学未来技术学院博士在读,主要研究方向为:位姿估计,点云理解与具身智能。
王晨希(通讯作者),西安交通大学机械工程学院副教授,主要研究方向为:故障诊断,自适应控制与强化学习。2022年入选陕西省科协青年人才托举计划,第11届上银优博论文佳作奖,发表SCI论文30余篇,国家发明专利8项,出版学术专著1部。
张馨雨,西安交通大学未来技术学院硕士在读,主要研究方向为:非合作目标感知。

