导读:本文首先介绍航天器控制(包括轨道、姿态、指向、振动)基本概念,然后以北京三号A/B卫星的高精度控制为案例进行阐述。2021年6月,北京三号A卫星成功对长江流域约360公里区域从东向西推扫成像,开启我国商业高分辨率遥感卫星沿任意航迹成像的新纪元。2022年8月,北京三号B卫星发射升空,进一步巩固并拓展了A卫星的技术优势,在国际上首次在轨实现沿曲线轨迹成像模式,突破传统线性推扫的局限,将地球观测效率与灵活性提升至全新高度。上述成就得益于我国自主研发的第二代敏捷卫星平台CAST3000E。该平台具有超高敏捷、超高稳定、超高精度的技术特点,拥有自主任务规划、自主图像处理的功能,对标国际先进敏捷卫星平台技术指标和成像模式。
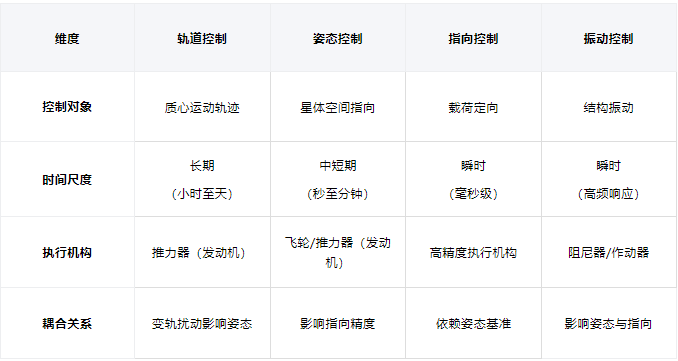
轨道控制:通过推力器(发动机)或引力辅助调整卫星质心运动轨迹的技术,主要作用是实现变轨、轨道保持、交会对接及再入返回等任务;工作原理是首先通过导航敏感器(如GPS)测量位置和速度来确定轨道,然后利用化学或电推进系统产生推力改变轨道参数(如半长轴、倾角)来轨道调整;轨道控制的典型干扰包括地球非球形引力、日月引力摄动等。
姿态控制:控制卫星绕质心的空间指向(滚动、俯仰、偏航三轴运动),实现姿态稳定(保持)和姿态机动(调整),主要作用是确保卫星本体稳定,并满足载荷工作条件(如天线对地);它的工作原理包括被动控制,即利用动力学特性(如自旋稳定、重力梯度稳定)实现控制,也包括主动控制,即通过敏感器(陀螺仪)、控制器(算法)和执行机构(飞轮、推力器)闭环调节实现控制。
指向控制:它是姿态控制的子集,专指对有效载荷(如相机、天线)的精确指向,作用是保障载荷功能实现(如对地观测、通信链路),指向控制主要依赖姿态控制系统提供基准;指向控制首先通过反作用轮角动量交换实现星体或载荷模块的粗调指向(适用于低频、大范围的姿态调整,精度受限于机械摩擦和动量饱和问题,通常难以满足亚角秒级需求),其次通过专为载荷设计的二级控制平台(如两轴平移机构或压电作动器),用于补偿执行机构的残余误差,通过电磁锁紧释放或柔性铰链实现微米级位移调整,典型应用包括分离式卫星中载荷模块的独立指向控制、天线波束的瞬时高精度跟踪;二级指向平台的目的是进一步消除振动、热变形等干扰,实现载荷的亚角秒级稳定。
振动控制:抑制卫星在轨运行期间,部件运行(飞轮、制冷机等)和结构柔性(柔性太阳能帆板,大型可展开天线等)等诱发的平台微振动,作用是提升高精度载荷的指向稳定性和指向精度,满足高分辨率遥感、深空探测等任务对亚角秒级指向精度及超稳工作环境的需求;例如抑制微振动对光学相机、通信天线等精密载荷的干扰,确保光学系统实现亚角秒级(<0.1″)指向精度;降低振动引起的像移或波束指向偏差,减少高分辨率遥感图像模糊、激光通信链路信号衰减等问题;利用磁悬浮隔振技术通过物理隔离载荷舱与平台振动,实现超静超稳成像环境等。技术实现原理包括:(1)被动减隔振 - 通过阻尼材料(如黏弹性层、金属橡胶)或结构设计(动力吸振器、结构频率优化)耗散振动能量,适用于中高频段振动抑制,具有无功耗、高可靠性特点。(2)主动减隔振 - 利用传感器(如振动传感器)实时监测振动,结合主动控制算法(如自适应控制算法、鲁棒控制算法等)驱动主动执行机构(如电磁作动器、压电作动器、磁致伸缩作动器等)实现微振动抑制,针对低频振动尤为有效,但需要消耗能量。
耦合关系:轨道、姿态、指向与振动控制四者具有相互耦合和影响的关系,例如变轨扰动影响姿态控制,姿态控制影响指向精度,指向控制依赖姿态基准,振动控制同时影响姿态和指向控制精度。以典型的航天任务为例,他们的使用场景为:(1)对地观测卫星:轨道控制维持太阳同步轨道 → 姿态控制保持星体对地定向 → 指向控制调整相机视场 → 振动控制进一步提升指向稳定性和指向精度。(2)通信卫星:轨道控制保持静止轨道 → 姿态控制确保天线覆盖区 → 指向控制微调波束指向。
以上概念整理:刘金鑫@XJTU
以下案例整理:赵玉婷、张骞
1. 三超控制系统
所谓三超控制系统是在第一代敏捷卫星CAST3000平台的姿态轨道控制系统(Attitude and Orbit Control System, AOCS)基础上进行的技术创新。其核心是通过在高分辨率相机载荷和卫星之间增加“主动振动抑制隔离和精确指向系统”(Vibration Isolation and Precise Pointing System, VIPPS),形成AOCS-VIPPS两级复合控制架构,这一设计实现了控制系统“快、稳、准”的兼顾。
传统控制系统中,卫星的“超高敏捷”性能往往以牺牲稳定性和精度为代价。三超控制系统通过引入滑模自适应多级协同控制算法,主要思路是:当航天器作快速机动任务时,载荷不进行姿态控制,通过对超静平台作动器设置较大控制参数实现聚合控制;当航天器做被动推扫观测任务时,对载荷进行姿态控制,通过对载荷控制器设置较小控制参数实现分离控制;当航天器做主动推扫观测任务时,通过对载荷控制器设置适中控制参数实现协调控制,从而将侧重敏捷性的大角度姿态机动与追求高稳定、高精度的精确指向两个过程解耦。针对不同任务阶段,系统动态调整控制策略,分段优化性能,实现“快”、“稳”、“准”的协同提升。 三超控制提出了一种聚合分离控制技术,根据快速机动、主动/被动推扫观测等不同任务需求,实时调节VIPPS平台的刚度和阻尼参数。如图1所示,在姿态机动阶段,提高刚度使载荷与星体刚性连接,确保快速响应;在观测阶段,降低刚度使载荷与星体柔性分离,有效隔离星体振动干扰,从而保障载荷的高精度和稳定性。
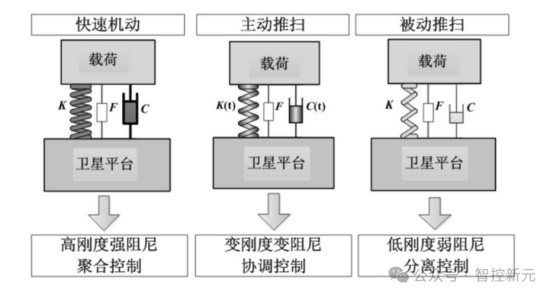
图1 卫星聚合分离三超控制系统变参数示意图
2. 超高敏捷特性

北京三号A/B卫星支持多种动中成像模式,包括沿任意航迹推扫、同轨多目标连续成像、多角度立体观测及曲线目标追踪等。这些复杂模式的实现,高度依赖卫星快速、精准的姿态机动能力。以多目标连续成像为例,卫星需在同一轨道周期内多次调整侧摆角度,以对多个分散目标完成连续推扫成像,如图3所示。当完成某一目标点成像后,卫星必须在极短时间内调整姿态并指向下一个目标,否则将因错过预设观测窗口而导致成像数据缺失或质量下降。这种卫星姿态的快速切换与经典控制的瞬态响应高度相似,二者均需在有限时间内完成状态转换,且转换过程中追求快速性与平稳性的和谐。
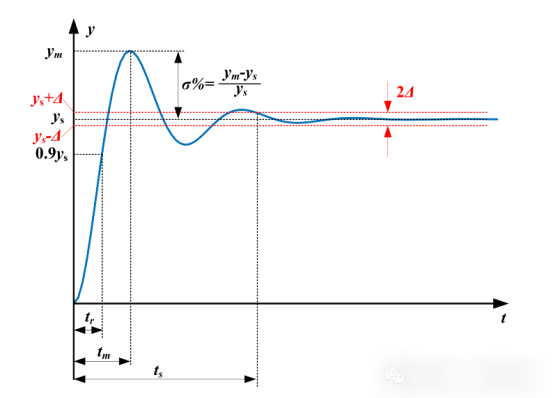
图2 系统的性能指标
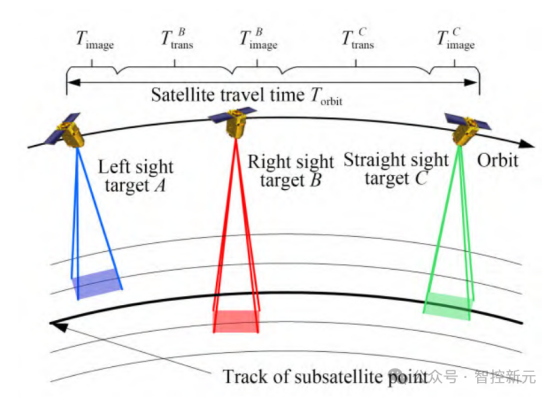
图3 多目标连续成像模式示意图
在三超控制系统中,采用滑模自适应多级协同控制的策略。该策略通过一级星体控制器与二级载荷控制器的协同工作实现复合控制,前者负责卫星本体的姿态控制,后者专司VIPPS平台的位姿调节。其中,“超高敏捷”特性主要依托一级星体控制器实现,其核心在于提升卫星的快速机动能力。在星体控制回路中,系统以轨道外推获取卫星的相对初始姿态,驱动控制力矩陀螺(Control Moment Gyro, CMG)完成卫星姿态的大角度快速机动。其中系统对CMG群的控制引入安装倾角变量,扩展其角动量包络,突破姿态机动的速度极限;同时采用考虑带宽约束的滑模自适应控制算法,根据星体高频抖动的幅值特征设计边界层参数。当位姿误差显著超出滑模面边界层时,控制器通过非线性模式提升增益,保证系统的快速收敛。这一机制相当于在二阶线性控制系统中同时达成上升时间压缩和超调抑制的双重优化;随着姿态误差趋近于滑模面,系统的非线性控制分量平滑过渡至动态线性控制阶段。此时系统的等效阻尼系数近似临界阻尼状态,保证星体姿态快速且平稳的收敛。
图4、5展示了卫星机动30°后载荷的三轴姿态响应曲线。由于载荷姿态机动主要依赖星体姿态调整,图中响应曲线的瞬态过程可间接反映星体控制系统的动态特性。对比实验数据显示,未应用多级协同控制的系统需要约100 s完成载荷姿态收敛,且X轴出现近50°超调;而应用多级协同控制系统后,载荷姿态收敛时间缩短至10s,相较前者提升近90%,同时X轴实现无超调平稳收敛。
在工程实践方面,搭载三超控制系统的北京三号A/B卫星可分别实现25°/10s和90°/25s的在轨姿态机动。其中北京三号B卫星能在80s内获取面积2500km2的两条带两视立体影像,这些实测数据有力地验证了三超控制系统极优的瞬态响应特性。
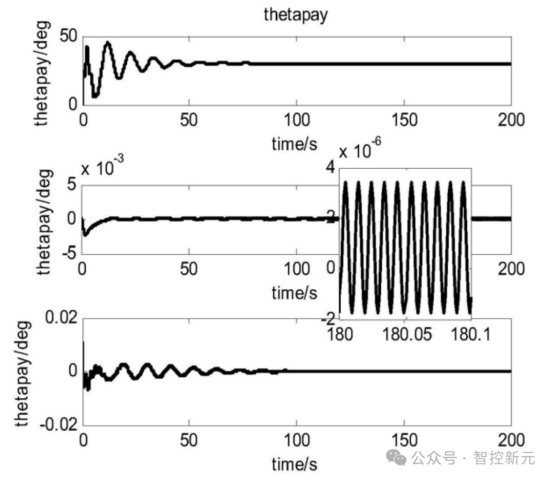
图4 未使用多级别协同控制情况下载荷三轴姿态响应情况
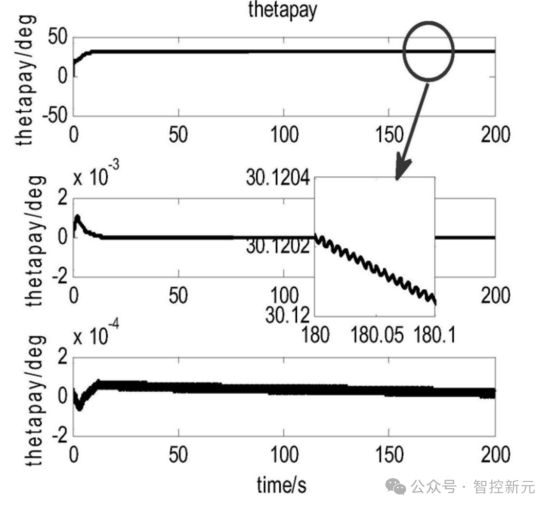
图5 使用多级别协同控制情况下载荷三轴姿态响应情况
3. 超高稳定与超高精度
在控制理论中,稳定性和稳态误差是评估控制系统的两个核心指标。稳定性作为系统正常运行的前提条件,其外部特性通常通过极点分布、幅值裕度、相位裕度等频域指标进行表征,而内部稳定性则基于李雅普诺夫函数等时域方法进行判定,二者共同构成系统抗干扰和抗不确定性的综合评估体系。稳态误差特指系统进入稳态后实际输出与期望输出间的残余偏差,是衡量系统跟踪精度的关键指标,图6通过系统类型与输入信号的对应关系直观展示了该指标的量化规律。在系统前向通道中引入积分环节,可提升系统型别,从而通过积分累积作用消除稳态误差。

图6 给定输入作用下的系统类型与稳态误差
然而在卫星控制领域,其稳定性与精度误差的评价体系与经典控制理论存在部分差异。随着天文观测、激光通信、遥感等任务对精细化、多元化操作需求的提升,卫星控制系统需同时满足“超高稳定”和“超高精度”的严苛要求。以高分辨率敏捷卫星为例,其“稳定性”主要通过可观测的姿态稳定度与长/短期成像稳定度等指标进行量化。其中姿态稳定度描述一段观测周期内,卫星的姿态变化量,以角速度(°)/s表示,星体控制器对低频有一定抑制,反映系统抑制低频扰动的鲁棒性;长期成像稳定度描述有效载荷在一段观测时间内三轴姿态的变化量,表示为角速度(°)/s,短期成像稳定度表示有效载荷在极短时间内三轴指向的姿态稳定性,以角度(″)表示,这两个指标是实现北京三号A/B卫星动中成像的关键,反映系统对星上高频振动抑制的实时性。关于“精度误差”,工程中采用指向控制精度指标表征有效载荷期望指向与实际指向的偏差,与传统控制理论中稳态误差概念有别的是,稳态误差与控制系统输入信号类别和系统阶型密切相关,而指向控制精度是实际和理想像元偏差,是对系统稳态误差、动态误差和硬件分辨率的综合体现。
卫星所面临的多源、宽频段扰动不仅威胁系统稳定性,更严重制约指向精度的提升。北京三号A/B卫星实现“超高稳定”和“超高精度”的关键在于构建复合控制架构,通过星体控制器与VIPPS(超静平台)的级联协同,形成分频段扰动抑制体系,前者负责星体低频段扰动抑制,后者负责中高频段隔振及精确指向。这种对全频段扰动的分频段协同抑制技术,既为系统稳定性提供基础保障,又为指向精度提升创造必要条件。
在二级载荷控制回路中,VIPPS平台通过主动隔振与精确指向的一体化控制构成了“超高稳定”和“超高精度”双指标实现的核心技术路径,其实现架构如图7所示。具体而言,在中高频振动隔离方面,系统采用积分加速度或积分力反馈对六个主动作动器进行解耦控制;在精确指向控制方面,则基于载荷端指向传感器的位移反馈信号,将指向控制器的输出量通过雅可比矩阵解耦映射至六个作动器上。
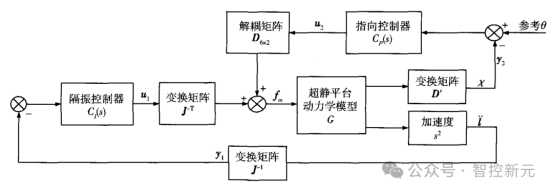
图7 超静平台隔振指向一体化控制策略
图8-11展示了VIPPS平台在低频、中高频及随机扰动下控制仿真的对比结果。仿真结果表明,无控状态下,VIPPS平台的指向精度和稳定性效果较差,载荷平台的指向末端在扰动下波动幅度大。施加主动振动控制后,系统的稳定性得到显著提升,指向精度也得到一定改善,但相较目标指向,仍存在明显误差。仅进行指向控制时,系统的末端指向与目标指向十分接近,但由于复杂扰动的干扰,系统难以保持稳定,在目标指向处大幅波动,进一步降低指向精度。而最终采用主动控制和精确指向的一体化控制策略后,系统的指向稳定度和指向精度同步提升,得到“超高精度”、“超高稳定”的效果。
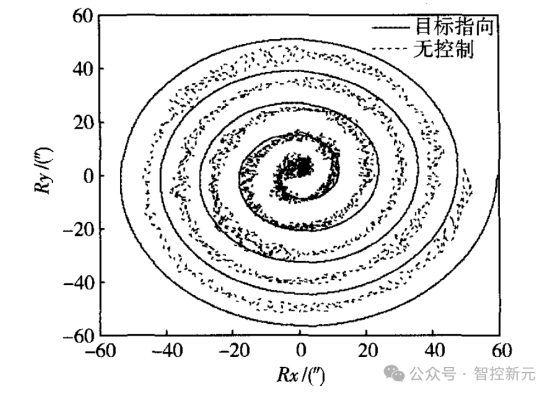
图8 外部扰动下超静平台无控制效果图
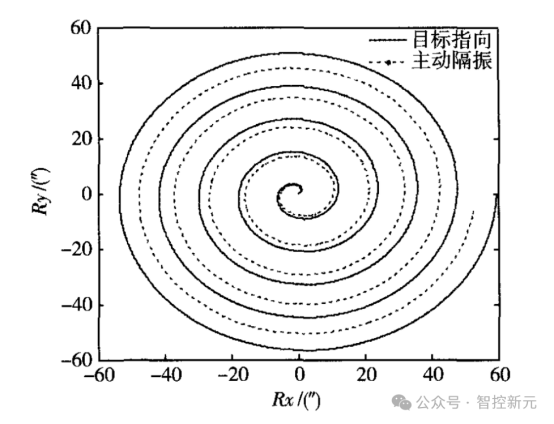
图9 外部扰动下超静平台仅进行主动隔振控制的效果图
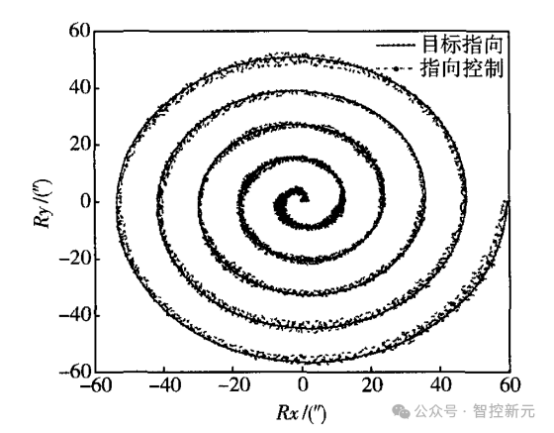
图10 外部扰动下超静平台仅进行指向控制的效果图
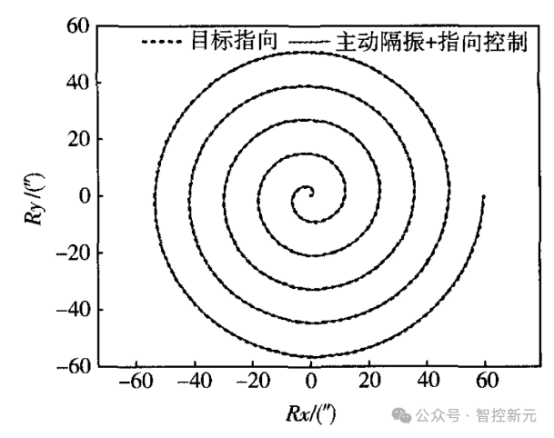
图11 外部扰动下超静平台进行主动隔振和精确指向一体化控制
针对太阳帆板等柔性附件引发的低频扰动,通过星体控制器的带宽约束机制实现有效隔离。在系统进入二级载荷控制时,星体姿态误差进入预设的容差范围,此时星体的滑模自适应控制器切换至准线性“精调”模式,设定其闭环带宽为载荷控制回路的1/10,阻尼比为2,在抑制星体低频扰动的同时实现与VIPPS平台的带宽分离,避免共振风险。这种控制策略有效解决全频段、多位置、多类型振动的耦合干扰问题。
图4、5、12、13分别给出卫星姿态机动30°后三轴响应情况,其中图4、5的稳态阶段对比了有无多级协同控制下卫星三轴姿态精度的变化,而图12、13的稳态阶段则对比了卫星三轴姿态的稳定度。由实验数据可知,应用多级协同控制后,三轴姿态精度从1.14×103(°)、5.30×106(°)、1.07×104(°)提升至1.54×106(°)、1.25×107(°)、1.85×106(°)。而载荷三轴的姿态稳定度由6.93×10⁻²(°)/s、1.50×10⁻³ (°)/s和6.43×10⁻²(°)/s提升至1.47×10⁻⁴(°)/s、1.14×10⁻⁵(°)/s和1.15×10⁻³(°)/s,系统稳定性和指向精度均得到大幅改进。
从工程实践来看,图14、15表示北京三号B卫星建立在轨稳定运行状态下,分别进行5°、15°、25°、35°、45°、55°、90°姿态机动测试所得的VIPPS载荷平台长期姿态稳定度和短期成像稳定度结果。其中载荷平台长期姿态波动幅度低于1×10⁻⁵(°)/s,每10~50ms的短期稳定度即使在0.01~1(°)星体角速度的工况下也优于0.005″,充分验证三超控制系统的“超高稳定”特性。
在指向精度方面,图16中“北京三号”B卫星的三轴指向控制精度均优于0.2″。并且“北京三号”B卫星数据产品的无控几何定位精度优于5m(CE90),已与美国Worldview-4卫星和法国Pleiades NEO卫星的定位精度旗鼓相当,在“超高精度”上跻身国际领先行列。
图12 未使用多级别协同控制情况下载荷三轴姿态稳定度

图13 未使用多级别协同控制情况下载荷三轴姿态稳定度示意图
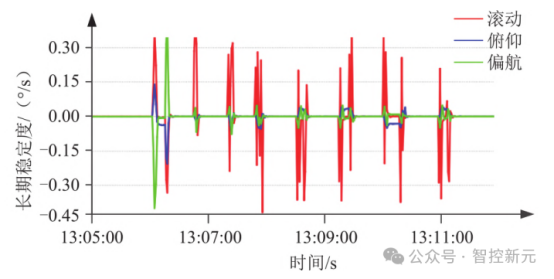
图14 北京三号B卫星载荷平台长期姿态稳定度
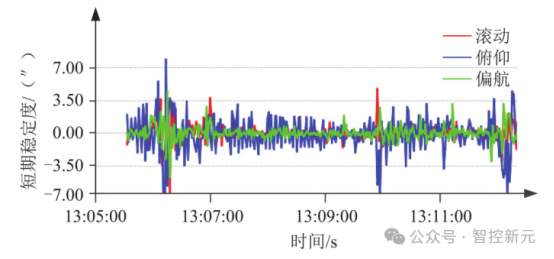
图15 北京三号B卫星载荷平台短期成像稳定度
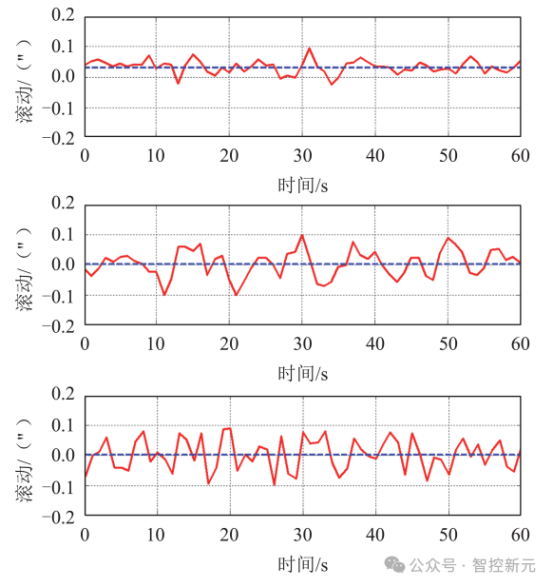
图16 北京三号 B 卫星在轨指向控制精度测试结果
4. 结语
三超控制的“超高敏捷”、“超高稳定”、“超高精度”三个特性相辅相成,共同保障了北京三号A/B卫星在航天遥感任务中的出色表现。从理论到工程应用,三超控制系统不仅为我国航天遥感领域带来了技术突破,也为控制理论在航天器的轨道、姿态、指向以及振动控制的实际工程中的应用提供了优秀范例。
(完)
整理者简介:
赵玉婷,西安交通大学,机械学院航天所,硕士研究生,主要从事航天器振动控制等方向研究。
张 骞,西安交通大学,机械学院航天所,博士研究生,主要从事航天器振动控制等方向研究。
欢迎关注:

参考文献:
[1]孙培红, 严明, 陈婷, 等. 北京三号卫星系统创新与应用展望[J]. 卫星应用, 2022(12): 12-17.
[2]杨芳, 赵键, 姚宁, 等. 北京三号A/B卫星总体设计及技术创新[J]. 卫星工程, 2023, 32(3): 7-15.
[3]袁利, 汤亮, 关新, 等. 一种卫星多级系统的聚合分离三超控制方法: CN111580532B[P]. 2023-04-14.
[4]曲友阳, 钟兴, 戴路, 等. 光学遥感卫星精密敏捷成像控制技术综述[J]. 光学精密工程, 2024, 32(5): 678-693.
[5] 关新, 汤亮, 王有懿, 等. 一种三超平台敏捷机动与快速稳定控制方法: CN108646775B[P]. 2021-03-26.
[6]王有懿, 姚宁, 袁利, 等. 一种卫星三超控制可变包络操纵律设计方法: CN111674570B[P]. 2021-10-01.
[7]姚宁, 袁利, 汤亮, 等. 一种卫星三超控制鲁棒自适应多级协同方法: CN111547275B[P]. 2021-12-07.
[8]王田野, 周徐斌, 吕旺, 等. 卫星姿态稳定度和指向精度评估方法及系统: CN113063435B[P]. 2022-12-13.
[9]王有懿, 汤亮, 何英姿. 超静平台隔振与指向一体化控制方法[J]. 航天控制, 2016(6): 33-39.
[10] 许凡, 何世民, 邢林峰, 等. 北京三号A/B卫星控制分系统设计与仿真验证[J]. 卫星工程, 2023, 32(3): 101-108.
[11]赵键, 杨芳. 中国高分辨率敏捷小卫星的技术创新及应用实践[J]. 卫星工程, 2021, 30(6): 23-30.

